 お問い合わせ
お問い合わせ English
English2022.05.12
国立大学法人筑波大学
あおみ建設株式会社
GPSの使えない水中で高精度に位置を計測する超音波測位システムを開発
近年、建設作業の生産性と安全性を向上させるため、無人化施工技術の開発が進められています。特に自然環境の影響が厳しい水中では、建設機械を水上から遠隔操縦する技術の開発が進められており、その実現には、建設機械の位置情報を精度よく安定して把握することが不可欠です。陸上や海上では電波を用いた全地球測位システム(Global positioning system; GPS)が活用できますが、水中では電波が届きにくいため、深海探査などで活用されている超音波による測位システムを応用しています。しかし、浅海域や港湾部などでは、海面・海底・構造物などで超音波が多重反射しやすく、既存の水中超音波測位システムでは、安定した測位を実現することが困難でした。
本研究グループは、測位に不要な反射波を排除する信号フィルタリング技術を有する、新しい水中超音波測位システム(水中版GPS)の開発に取り組み、水深や構造物の有無による影響を受けず、安定かつ精度良く計測できる、新しい超音波測位システムの開発に成功しました。このシステムは、水中作業用建設機械の遠隔操縦技術に活用できるだけでなく、水中ドローンを利活用したインフラ点検の効率化や沿岸パトロール業務、水産分野への応用など、水中IoTの実現に貢献することが期待されます。
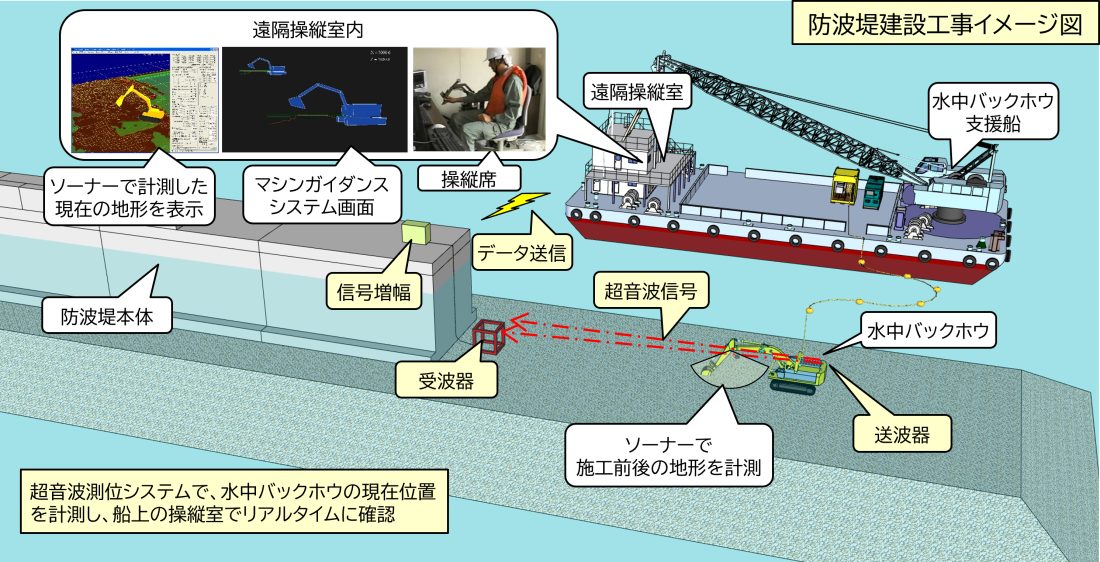 防波堤建設工事における水中バックホウを活用した無人化施工のイメージ
防波堤建設工事における水中バックホウを活用した無人化施工のイメージ
研究の背景
近年、建設業界では、技術者の不足への対応と、工事の安全性および品質や生産性の向上を目指して、情報通信技術を積極的に活用した施工の自動化、自律化、遠隔化が推進されています(i-Construction)。厳しい自然環境下で行われる海洋・港湾工事の建設現場では、これまで潜水士の人力に頼っていた作業の機械化が推進されており(図1)、潜水士が直接操縦する水中バックホウの開発・運用が進んでいます。一方で、より一層の安全性向上や省力化を図るためには、船上から遠隔で機械を操縦する技術が不可欠ですが、水中で位置を安定かつ精度よく計測できる技術の不在が、最大の障壁となっていました。
水中では電波の減衰が大きいため、陸上や海上のようにGPSを用いて位置を精度良く計測することは困難です。そこで、深海探査の分野では、電波の代わりに超音波を利用して測位する技術が活用されてきました。これは、音源が発した音が複数のマイクロフォンに届くまでに要した時間を測定することで、音源と各マイクロフォン間の距離を算出し、三角測量の原理で測位するものです。ところが、一般に、海洋・港湾土木工事の現場は水深が浅く、音源が発した音波は、海面、海底、構造物などで多重反射して伝搬し、直達波に加え、時間遅れを伴う複数の反射波も混在してしまいます。これにより、音源とマイクロフォン間の正確な測距が妨げられるという課題がありました(図2)。
研究内容と成果
本研究では、不要な反射波を排除する新しい信号フィルタリング技術を中核とする、水中超音波測位システムを開発しました。このシステムは、音波が多重反射する水中において、安定かつ高精度な測位を、以下の要領で実現します(図3)。
- 測位対象エリアをある大きさのメッシュで区切り、メッシュ領域内の音源から発せられた音がマイクロフォン群に到達する時刻を、仮想空間で予め計算してデータベースに格納する。
- 実空間で複数のマイクロフォンにより観測された受信信号を、データベースと比較することで、音源が存在する領域を決定する(粗測位)。
- 音源が存在する領域の位置情報を用いて、受信信号から不要な反射波を排除する(フィルタリング)。
- 反射波を排除した信号(直達波のみ)を用いて、音源とマイクロフォン間の正確な測距を行い、三角測量の原理により音源の正確な位置を決定する(精密測位)。
多重反射が顕著な試験環境(大型水槽)で、本システムの性能を評価したところ、従来システムの測定誤差(平均25cm~2.4m)に対して、本システムでは平均3cm程度であり、水中の位置を高精度で安定して測位できることが実証されました。
なお、本研究成果に関し、特許を取得しました(特許番号:7049572、取得日:2022年3月30日)。
今後の展開
当面は、実海域での実験を積み重ね、水中建設機械の測位技術として確立させ、建設業の無人化施工の推進を図ります。さらに、将来的には水中ドローンなどにも活用できるよう、機材の小型化・軽量化を検討していきます。
今後、水中超音波測位システムの水中基準局が整備・常設されれば、GPSのような測位インフラとして、建設工事だけでなく、水中のインフラ点検の効率化や沿岸パトロール業務、水産業等への応用が進み、水中IoTの実現にも貢献することが期待されます。
参考図
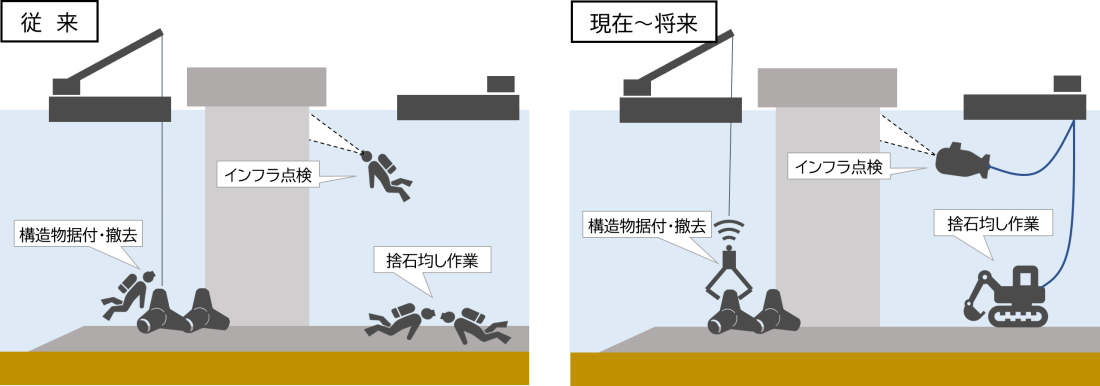 図1 海洋・港湾土木工事の建設現場における作業の変遷
図1 海洋・港湾土木工事の建設現場における作業の変遷
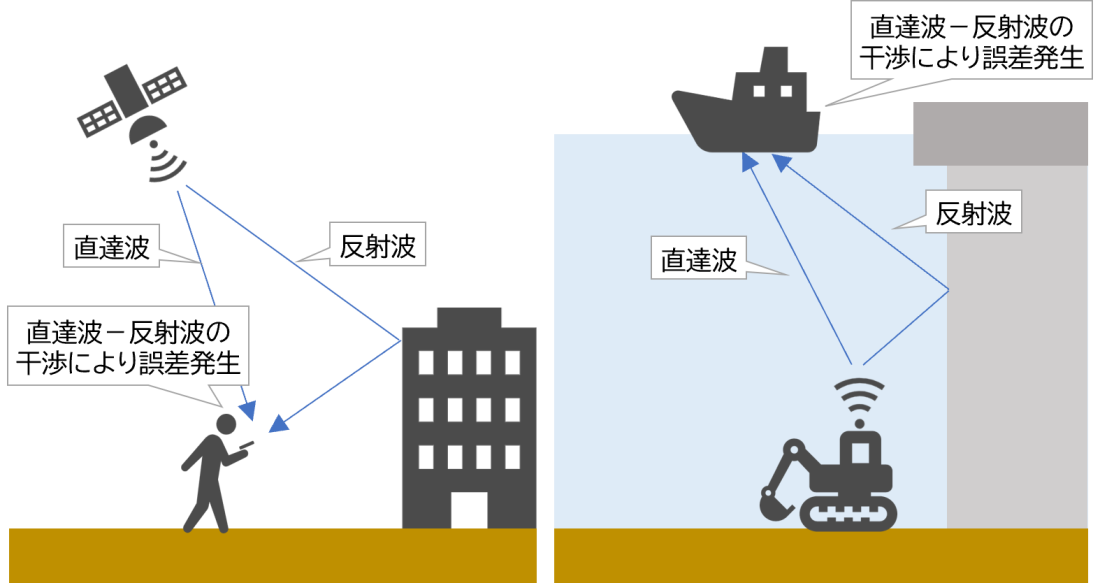 図2 地上(左図)および水中(右図)において反射波が測位に与える影響
図2 地上(左図)および水中(右図)において反射波が測位に与える影響
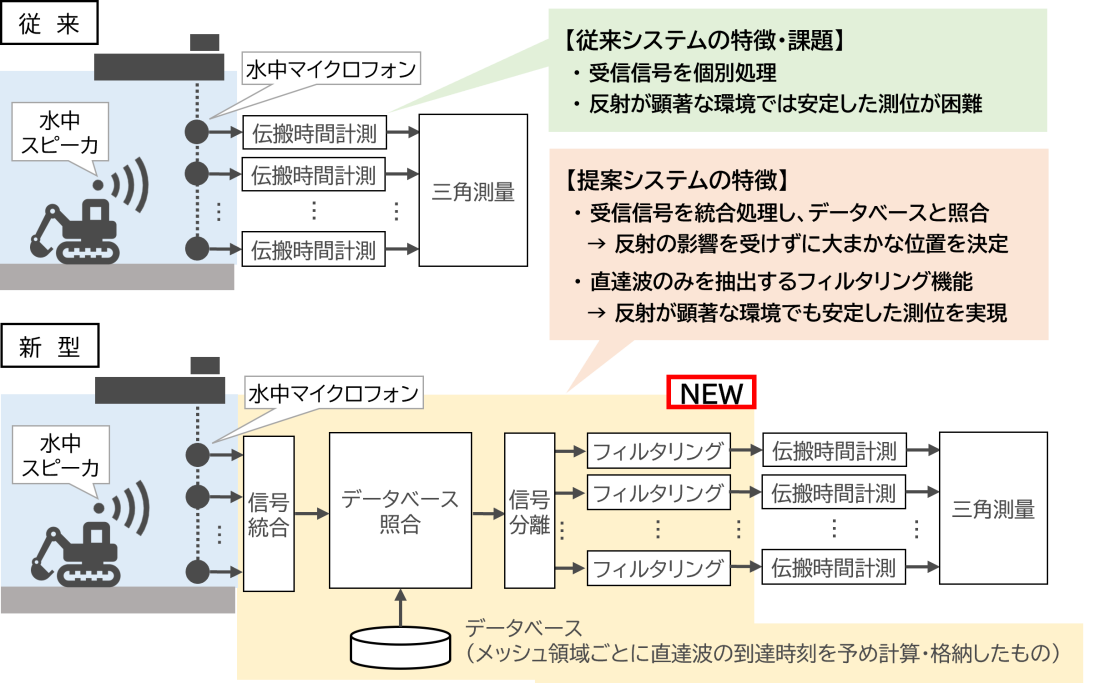 図3 水中超音波測位システムの概要および特徴
図3 水中超音波測位システムの概要および特徴
用語解説
注1) 水中バックホウ
陸上土木工事で幅広く活用されているバックホウ(油圧ショベル)を水中で稼働できるように改造したもので、作業支援船から電力を供給し、潜水士が直接搭乗して操縦するものです。主に、防波堤の基礎となる捨石マウンドの均し作業、管路敷設作業、構造物破砕作業などに使われます。
掲載論文
- 【題 名】
- Underwater Acoustic Positioning in Multipath Environment Using Time-of-flight Signal Group and Database Matching
(音波の伝搬時間群とデータベース照合を用いたマルチパス環境下における水中音響測位) - 【著者名】
- Tohru Yoshihara, Tadashi Ebihara, Koichi Mizutani, and Yuma Sato
- 【掲載誌】
- Japanese Journal of Applied Physics
- 【掲載日】
- 2022年4月26日(オンライン先行公開)
- 【DOI】
- 10.35848/1347-4065/ac6a3d
問合わせ先
- 【研究に関すること】
- <技術関係>
- 海老原 格(えびはら ただし)
筑波大学 システム情報系知能機能工学域 准教授
URL: http://www.aclab.esys.tsukuba.ac.jp/~ebihara - <運用関係>
- 吉原 到(よしはら とおる)
あおみ建設株式会社 技術事業本部技術開発部 - 【取材・報道に関すること】
- あおみ建設株式会社 管理本部総務部
TEL: 03-5209-7761
E-mail: soumu@aomi.co.jp
プレスリリース資料
リンク
TSUKUBA JOURNAL「GPSの使えない水中で高精度に位置を計測する超音波測位システムを開発」
耐マルチパス水中音響測位装置 「そこにイルカ」
マルチパス環境下でも、測位に不要な反射波をフィルタリングすることで、安定して高精度に測位ができる水中音響測位装置です。

水中バックホウ・ビッグクラブ
潜水士が人力で行ってきた水中での均し作業を機械化した技術です。